设计一个带有一个移动副的四杆机构(如图),实现输入杆AB转角φj与输出滑块CC’的移动Sj之间的对应关系。已知起始时φ0和S0、固定铰链点A的坐标。 (1)分别写出从起始位置到第j组对应位置,构件AB和滑块的位移矩阵; (2)如何得到机构的设计方程? (3)分析该机构最多能够实现多少组精确对应位置关系 (4)如何求出机构的L2,L3,L4α等机构运动参数? 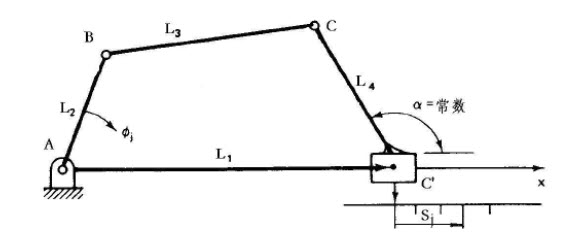
正确答案:
答案解析:有

微信扫一扫手机做题
机械工程
设计一个带有一个移动副的四杆机构(如图),实现输入杆AB转角φj与输出滑块CC’的移动Sj之间的对应关系。已知起始时φ0和S0、固定铰链点A的坐标。 (1)分别写出从起始位置到第j组对应位置,构件AB和滑块的位移矩阵; (2)如何得到机构的设计方程? (3)分析该机构最多能够实现多少组精确对应位置关系 (4)如何求出机构的L2,L3,L4α等机构运动参数?
微信扫一扫手机做题